ชอปเปอร์ | แปลง DC เป็น DC
แปลง DC เป็น DC ทุกวันนี้เป็นที่ต้องการอย่างมากในอุตสาหกรรมหลายประเภทการใช้งานขึ้นอยู่กับแหล่งจ่ายแรงดัน DC ประสิทธิภาพของแอปพลิเคชันเหล่านี้จะได้รับการปรับปรุงหากเราใช้แหล่งจ่ายไฟแบบปรับตัวแปรได้ มันจะช่วยในการปรับปรุงการควบคุมของอุปกรณ์ด้วย ตัวอย่างของแอพพลิเคชั่นดังกล่าว ได้แก่ รถยนต์รถไฟใต้ดินรถรางรถเข็นรถใช้แบตเตอรี่เป็นต้นเราสามารถควบคุมและปรับแรงดันไฟฟ้ากระแสตรงให้คงที่ มีด.
Chopper เป็นอุปกรณ์อิเล็กทรอนิกส์ที่ใช้พลังงานแบบคงที่อุปกรณ์ที่แปลงแรงดันไฟฟ้า DC / พลังงานคงที่ให้เป็นแรงดันไฟฟ้ากระแสตรง DC หรือตัวแปร มันไม่มีอะไรนอกจากสวิตช์ความเร็วสูงที่เชื่อมต่อและตัดการเชื่อมต่อโหลดจากแหล่งที่มาในอัตราที่สูงเพื่อรับแรงดันไฟฟ้าที่เปลี่ยนแปลง

มีด สามารถเพิ่มหรือลดระดับแรงดัน DC ที่ด้านตรงข้ามได้ ดังนั้นสับมีวัตถุประสงค์เดียวกันในการถ่ายโอนวงจร DC ในกรณีของวงจร ac ดังนั้นจึงเป็นที่รู้จักกันในชื่อ DC Transformer
อุปกรณ์ที่ใช้ใน Chopper
แอพลิเคชันพลังงานต่ำ: GTO, IGBT, Power BJT, Power MOSFET เป็นต้น
แอพลิเคชันพลังงานสูง: ไทริสเตอร์หรือ SCR
อุปกรณ์เหล่านี้ถูกแทนด้วยสวิตช์ในกล่องประเพื่อความเรียบง่าย เมื่อกระแสไฟฟ้าถูกปิดสามารถไหลในทิศทางของลูกศรเท่านั้น

1) ลดระดับ Chopper:
ลดระดับชอปเปอร์ขณะที่ Buck ทำการแปลงเพื่อลดระดับแรงดันไฟฟ้า i / p ที่ด้านเอาท์พุท วงจรไดอะแกรมของตัวสับแบบก้าวลงจะแสดงในรูปที่อยู่ติดกัน
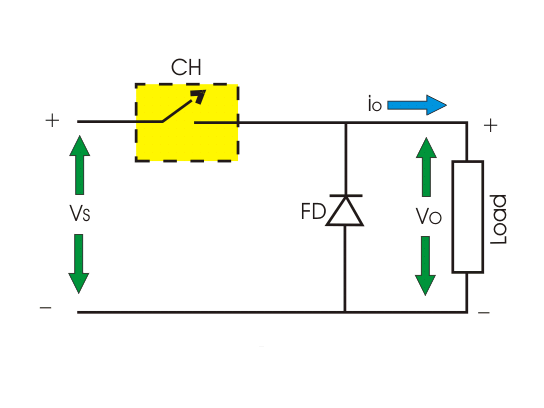
เมื่อ CH เปิดอยู่ Vs ปรากฏขึ้นทั่วทั้งโหลดโดยตรงดังแสดงในรูป ดังนั้นโวลต์โอ = VS.

เมื่อ CH ถูกปิด Vs ถูกยกเลิกการเชื่อมต่อจากโหลด ดังนั้นแรงดันเอาต์พุต Vโอ = 0

รูปคลื่นของแรงดันไฟฟ้าของเครื่องลดแรงดันไฟฟ้าแบบก้าวลงมีดังต่อไปนี้:

Tบน →เป็นช่วงเวลาที่มีการสับในสถานะเปิด
Tปิด →เป็นช่วงเวลาที่มีการสับในสถานะปิด
VS →แหล่งกำเนิดหรือแรงดันไฟฟ้าอินพุต
Vโอ →แรงดันเอาต์พุตหรือโหลด
T →ระยะเวลาการสับ = Tบน + Tปิด
การทำงานของสเต็ปดาวน์ชอปเปอร์พร้อมโหลดตัวต้านทาน
เมื่อ CH เปิด, Vโอ = VS
เมื่อ CH ปิดอยู่ Vโอ = 0


โดยที่ D คือวัฏจักรหน้าที่ = Tบน/ T
Tบน สามารถเปลี่ยนแปลงได้ตั้งแต่ 0 ถึง T ดังนั้น 0 ≤ D ≤ 1 ดังนั้นแรงดันเอาต์พุต Vโอ สามารถเปลี่ยนแปลงได้ตั้งแต่ 0 ถึง VS.

ดังนั้นเราจึงสามารถสรุปได้ว่าแรงดันไฟฟ้าขาออกอยู่เสมอน้อยกว่าแรงดันอินพุตและด้วยเหตุนี้ชื่อขั้นตอนลงสับเป็นธรรม แรงดันเอาท์พุทและรูปคลื่นปัจจุบันของเฮลิคอปเตอร์แบบสเต็ปดาวน์พร้อมโหลดตัวต้านทานแสดงอยู่ด้านล่าง

การทำงานของสเต็ปดาวน์ชอปเปอร์ด้วยโหลดแบบเหนี่ยวนำ
เมื่อ CH เปิด, Vโอ = VS
เมื่อ CH ปิดอยู่ Vโอ = 0
ในช่วงเวลาของการสับ

ดังนั้นแรงกระแสสูงสุดถึงสูงสุด


ในช่วงเวลาปิดของ Chopper
หากค่าตัวเหนี่ยวนำของ L มีขนาดใหญ่มากกระแสโหลดจะต่อเนื่องตามธรรมชาติ เมื่อ CH ถูกปิด inductor จะกลับขั้วและการคายประจุ กระแสอิสระเสรีนี้ผ่านไดโอด FD

โดย equating (i) และ (ii)

ดังนั้นจาก (ฉัน) เราจะได้รับ

แรงดันเอาท์พุทและรูปคลื่นปัจจุบันของชอปเปอร์แบบสเต็ปดาวน์พร้อมโหลดแบบอุปนัยแสดงอยู่ด้านล่าง

2) เพิ่ม Chopper หรือ Boost Converter:
Step up chopper หรือ boost converter ถูกใช้เพื่อเพิ่มระดับแรงดันไฟฟ้าอินพุตของด้านเอาต์พุต แผนภาพวงจรและรูปคลื่นแสดงดังภาพด้านล่าง


การทำงานของ Step up Chopper
เมื่อ CH เปิดอยู่จะทำให้โหลดสั้นลง ดังนั้นแรงดันขาออกระหว่าง Tบน เป็นศูนย์ ในช่วงเวลานี้จะมีการเรียกเก็บเงินจากตัวเหนี่ยวนำ ดังนั้นโวลต์S = VL


ที่ไหนΔฉันเป็นตัวเหนี่ยวนำสูงสุดถึงกระแสไฟฟ้าสูงสุด
เมื่อ CH ปิดตัวเหนี่ยวนำ L จะปล่อยประจุออกมาผ่านโหลด ดังนั้นเราจะได้ผลรวมของแรงดันไฟฟ้าทั้งสองแหล่ง VS และตัวเหนี่ยวนำแรงดันไฟฟ้า VL เป็นแรงดันไฟฟ้าออกเช่น


ตอนนี้โดย equating (iii) และ (iv)

เนื่องจากเราสามารถเปลี่ยน TON จาก 0 เป็น T ดังนั้น 0 ≤ D ≤ 1 ดังนั้น VO สามารถเปลี่ยนแปลงได้จาก VS ถึง∞ เป็นที่ชัดเจนว่าแรงดันไฟฟ้าขาออกมากกว่าแรงดันไฟฟ้าขาเข้าเสมอดังนั้นจึงเป็นการเพิ่มหรือเพิ่มระดับแรงดัน
Buck-Boost Converter หรือตัวแปลง Step Up Step Down
ด้วยความช่วยเหลือของตัวแปลง Buck-Boost ทำให้เราสามารถเพิ่มหรือลดระดับแรงดันอินพุตที่ด้านเอาท์พุท แผนภาพวงจรของตัวแปลงนี้แสดงไว้ด้านล่าง

การทำงานของ Buck-Boost Converter
เมื่อ CH คือ ON แรงดันไฟฟ้าของแหล่งที่มาจะถูกนำไปใช้กับตัวเหนี่ยวนำ L และมันจะถูกเรียกเก็บเงิน
ดังนั้นโวลต์L = VS

เมื่อชอปเปอร์ปิดตัวเหนี่ยวนำ L จะกลับขั้วและปล่อยประจุผ่านโหลดและไดโอดดังนั้น

โดยการประเมิน (v) และ (vi) เราได้รับ

เราจะได้ขนาด

D สามารถเปลี่ยนแปลงได้ตั้งแต่ 0 ถึงหนึ่ง
เมื่อใด D = 0; Vโอ = 0
เมื่อ D = 0.5, Vโอ = VS
เมื่อ D = 1, Vโอ = ∞
ดังนั้นในช่วง 0 ≤ D ≤ 0.5 แรงดันเอาต์พุตจะแตกต่างกันในช่วง 0 ≤ VO ≤ VS และเราได้รับขั้นตอนลงหรือการดำเนินการบั๊ก
ในขณะที่ในช่วง 0.5 ≤ D ≤ 1 แรงดันเอาต์พุตจะแตกต่างกันไปในช่วง VS ≤ VO ∞∞และเราได้รับการก้าวขึ้นหรือเพิ่มการดำเนินการ
ตามทิศทางของแรงดันขาออกและกระแส
อุปกรณ์เซมิคอนดักเตอร์ที่ใช้ในวงจรสับเป็นทิศทางเดียว แต่การจัดเรียงอุปกรณ์ในวิธีที่เหมาะสมเราสามารถรับแรงดันขาออกรวมทั้งกระแสเอาต์พุตจากตัวสับในทิศทางที่ต้องการ ดังนั้นบนพื้นฐานของคุณสมบัติสับนี้สามารถแบ่งได้ดังนี้

ก่อนการวิเคราะห์อย่างละเอียดบางแนวคิดพื้นฐานเกี่ยวกับ Vโอ - ผมโอ จำเป็นต้องมี Quadrant ที่นี่
ทิศทางของฉันโอ และ Vโอ ทำเครื่องหมายในรูปที่ 1 ถูกนำมาเป็นทิศทางบวก

ถ้าแรงดันขาออก (Vโอ) และกระแสไฟขาออก (I)โอ) ตามทิศทางที่ทำเครื่องหมายไว้ในรูปจากนั้นการดำเนินการกับชอปเปอร์จะถูก จำกัด ในส่วนที่หนึ่งของ Vโอ - ผมโอ เครื่องบิน. การทำงานประเภทนี้เป็นที่รู้จักกันในชื่อการขับเคลื่อนไปข้างหน้า

เมื่อแรงดันขาออก (Vโอ) ตามทิศทางที่ทำเครื่องหมายไว้ในรูปที่ 1 แต่กระแสไหลในทิศทางตรงกันข้ามจากนั้น Vโอ เป็นสิ่งที่ดี แต่ฉันโอ เป็นลบ ดังนั้นตัวสับจะทำงานในจตุภาคที่สองของ Vโอ - ผมโอ เครื่องบิน. การทำงานประเภทนี้เรียกอีกอย่างว่าการเบรกด้านหน้า

มันอาจเกิดขึ้นได้ว่าทั้งแรงดันขาออกและกระแสตรงข้ามกับทิศทางที่ถูกทำเครื่องหมายในรูปที่ - 1 ในกรณีของเขาทั้งสองโอ และฉันโอ ถูกมองว่าเป็นลบ ดังนั้นการดำเนินการของสับถูก จำกัด ในด้านที่สามของ Vโอ-ผมโอ เครื่องบิน. การดำเนินการนี้เรียกว่า reverse motoring

ถ้าแรงดันเอาต์พุตตรงข้ามกับเครื่องหมายทิศทางในรูป 1. จากนั้นมันจะถูกนำมาเป็นลบ แต่เอาท์พุทปัจจุบันตามทิศทางตามที่ระบุไว้ในรูปที่ 1 และถือว่าเป็นบวก ดังนั้น chopper ทำงานใน quadrant ที่ 4 ของ Vโอ - ผมโอ เครื่องบิน. โหมดการทำงานนี้เรียกว่าการเบรกแบบย้อนกลับ

ตอนนี้เราสามารถดำเนินการวิเคราะห์รายละเอียดของชอปเปอร์ชนิดต่าง ๆ สับบางตัวทำงานใน Quadrant เดียวเท่านั้นซึ่งเรียกว่า Chopper Quadrant เดียว สับบางคนทำงานในสองด้านซึ่งเป็นที่รู้จักกันในชื่อสับสองด้าน อาจเป็นไปได้ว่ามีดสับทำงานในทุกด้านซึ่งเรียกว่า
Type-A Chopper
มันเป็นสับ Quadrant เดียวที่มีการดำเนินการถูก จำกัด ใน Quadrant แรกของ Vโอ - ผมโอ เครื่องบิน. แผนภาพวงจรแสดงดังต่อไปนี้:
เมื่อ CH เปิดทั้ง Vโอ และฉันโอ ทำตามคำแนะนำในรูป ดังนั้นทั้งสองจึงถูกนำมาเป็นบวกดังนั้นกำลังไฟฟ้าจึงเป็นบวก
เมื่อ CH ถูกปิด freewheels ปัจจุบันผ่าน diode ดังนั้น Vโอ เป็นศูนย์และฉันโอ เป็นบวก
ในชอปเปอร์ประเภท A จะเห็นว่าค่าเฉลี่ยของ Vโอ และฉันโอ เป็นบวกเสมอ นี่เรียกอีกอย่างหนึ่งว่าก้าวลงสับเป็นค่าเฉลี่ยของ Vโอ น้อยกว่าแรงดันไฟฟ้าอินพุต เครื่องบดชนิดนี้เหมาะสำหรับการใช้งานมอเตอร์


Type-B Chopper
นี่ก็เป็นสับเฮลิคอปเตอร์ Quadrant เดียวที่ทำงานในจตุภาคที่สองของ Vโอ - ผมโอ เครื่องบิน. แผนภาพวงจรแสดงในรูปต่อไปนี้


เป็นที่น่าสนใจที่จะทราบว่าโหลดจะต้องมีแหล่งจ่ายแรงดัน DC สำหรับการทำงานประเภทนี้
เมื่อ CH อยู่บน Vโอ เป็นศูนย์ แต่กระแสไหลในทิศทางตรงกันข้ามตามที่ทำเครื่องหมายไว้ในรูป เมื่อสับถูกปิด
ซึ่งเกินแรงดันแหล่งจ่าย VS. กระแสจึงไหลผ่านไดโอด D และถือว่าเป็นลบ
ดังนั้นปัจจุบันฉันโอ เป็นลบเสมอที่นี่ แต่ Vโอ เป็นค่าบวก (บางครั้งเป็นศูนย์) ดังนั้นพลังงานไหลจากโหลดไปยังแหล่งที่มาและการทำงานของตัวแยกประเภท B นั้นถูก จำกัด ไว้ในจตุภาคที่สองของ Vโอ - ผมโอ เครื่องบิน. ชอปเปอร์ชนิดนี้เหมาะสำหรับการเบรกหน้า
Type-C Chopper
นี่คือสับ Quadrant สองอันที่การดำเนินการถูกล้อมรอบระหว่าง Quadrant แรกและอันดับสองของ Vโอ - ผมโอ เครื่องบิน. ชอปเปอร์ชนิดนี้ได้รับจากการเชื่อมต่อชอปเปอร์ชนิด A และ Type-B แบบขนานดังแสดงในรูปที่


เมื่อ CH1 เป็น ON กระแสไหลผ่าน abcdefa และ L จะเหนี่ยวนำประจุ ดังนั้นแรงดันเอาต์พุต Vโอ และปัจจุบันฉันโอ ทั้งสองจะเป็นบวก เมื่อ CH1 ดับการเหนี่ยวนำจะปล่อยผ่าน D1 และปัจจุบันฉันโอ จะไหลผ่านทิศทางเดียวกันโดยไม่มีแรงดันเอาต์พุตเป็นศูนย์ ดังนั้นเราสามารถเห็นการทำงานของ CH1 ไม่มีอะไรนอกจากการทำงานของ Chopper แบบ A ซึ่งเราสามารถใช้งาน Chopper ได้ใน Quadrant แรก
เมื่อ CH2 เป็น ON, แรงดันเอาต์พุต Vโอ จะเป็นศูนย์ แต่เอาท์พุทปัจจุบัน Iโอ จะไหลในทิศทางตรงกันข้ามของกระแสไฟฟ้าที่แสดงในรูปและตัวเหนี่ยวนำจะถูกชาร์จ เมื่อ CH2 เป็นแรงดันไฟฟ้าขาออก

ซึ่งเกินค่าของแหล่งจ่ายแรงดันไฟฟ้า VS. กระแสจึงไหลผ่านไดโอด D2 และถือว่าเป็นลบ ดังนั้นแรงดันเอาต์พุต Vโอ เป็นค่าบวกเสมอและเอาต์พุตปัจจุบัน Iโอ เป็นลบเสมอที่นี่ เราสามารถเห็นการทำงานของ CH2 ไม่มีอะไรนอกจากการทำงานของ Chopper แบบ B ซึ่งเราสามารถใช้งาน Chopper ได้ใน Quadrant ที่สอง
เราสามารถสรุปได้ว่าการทำงานของ Chopper แบบ C คือการทำงานร่วมกันของ Chopper แบบ A และ Type B ประเภทนี้ มีด เหมาะสำหรับการขับเคลื่อนไปข้างหน้าและการเบรกด้านหน้า